Réactions chimiques exothermiques. Contrôle
thermique et réfrigération.
Exothermic chemistry reactions. Thermic control and refrigeration.
Redactores:
Silvia Calvet Márquez
Doctora en Ciencias Químicas
CENTRO NACIONAL DE CONDICIONES DE TRABAJO
| Esta Nota Técnica de Prevención es continuación de la NTP 527. El objetivo de este trabajo es el estudio de los sistemas de control y regulación de la temperatura; en que consisten y su aplicación, además de dar información sobre los modos de fallo típicos de cada elemento. |
Es importante medir y regular la temperatura en un proceso, por el efecto adverso que tiene su pérdida de control sobre otras variables como, por ejemplo, la velocidad de la reacción, la presión, la velocidad de corrosión, las condiciones de equilibrio, además del estado y solubilidad de las sustancias.
En esta Nota Técnica se tratan dos aspectos claves del control de la temperatura: en primer lugar, cómo se determina la temperatura en un proceso (que instrumento de medida se puede utilizar); y, en segundo lugar, de que modo se puede disipar el calor generado en el reactor.
Las plantas de proceso automatizadas dependen de un sistema de control y el fallo (pérdida de la capacidad para realizar correctamente la función requerida) de un instrumento o equipo en particular puede tener efectos muy graves. Por ello, es importante considerar desde un inicio, en la etapa de diseño, los modos de fallo de los equipos que se van a utilizar, considerando primero la manera en que cada instrumento va a ser utilizado. Esta es la razón por la que se explicarán, además, los modos de fallo más comunes de estos equipos.
Generalmente, la medida de la temperatura de un proceso se divide en dos partes. Por un lado, se necesita hacer la lectura de la temperatura en el lugar deseado (por ejemplo, el reactor) y, luego, la información obtenida debe transmitirse hasta el punto de control, muchas veces situado a varios metros de distancia.
Para detectar la temperatura, existen en el mercado diferentes sensores (todos ellos se basan en la relación existente entre alguna característica física y la temperatura). La elección del sensor más adecuado en cada caso (14) vendrá dada por las particularidades de su aplicación; deberán considerarse una serie de factores tales como el rango de temperatura, la precisión, la velocidad de respuesta, el coste y los requisitos de mantenimiento.
En la industria de procesos químicos los sensores de temperatura comúnmente utilizados son los termopares y las termorresistencias, por razones económicas, de precisión y de estabilidad; aunque, también existen los llamados sensores de infrarrojos, los termistores o los sistemas térmicos de relleno, entre otros (3, 5, 7, 9-11 y 14).
Ningún sensor debe introducirse nunca directamente en el proceso si hay líquidos inflamables. Han habido numerosos accidentes al desenroscar un termopar para mantenimiento y producirse una fuga de disolvente, que ha provocado un incendio. El uso de una vaina soldada o embridada, dentro de la cual se inserta el sensor, reduce la posibilidad de estos incidentes. Además, de este modo se protege al sensor de los efectos dañinos de la corriente de fluido, tal como la erosión, corrosión, oxidación o atmósfera reducida, además de permitir su extracción para el mantenimiento.
El termopar consiste en un circuito formado por dos metales diferentes cuyas uniones se mantienen a distinta temperatura. Se genera así una fuerza electromotriz (f.e.m.) que depende del tipo de termopar y de la diferencia de temperaturas entre las dos uniones: la fría o de referencia, y la caliente o de medida. Con el aumento de la temperatura, también aumenta la f.e.m., aunque no necesariamente de modo lineal. Existen diversos tipos de termopares, según sea la composición de los dos hilos que los forman. Por orden de aplicación de temperaturas, de menor a mayor, se utilizan normalmente los de cobre-constantan (tipo T), los de hierroconstantan (tipo J), los de cromel-alumel1 (tipo K) y los de platino-rodio (tipo R o S). Las temperaturas de aplicación abarcan desde los -270°C a + 400°C en el tipo T, hasta los 1768°C en el tipo S.
La relación f.e.m. - temperatura del termopar no es lineal, por lo que las escalas de los instrumentos de temperatura cuyo elemento es el termopar dependen de cada tipo de elemento. No obstante, existen instrumentos para linealizar las lecturas con el fin de que en el panel de control puedan utilizarse escalas lineales.
El tiempo de respuesta del termopar con vaina o tubo de protección será de tres a diez veces mayor que el del termopar sin protección. Los métodos generalmente utilizados, para reducir el tiempo de respuesta, consisten en minimizar la cámara de aire entre el sensor y la vaina o en sustituirla por un medio más conductor, con lo cual se facilita la transferencia de calor entre los dos elementos. Esto se logra por ajuste del diámetro externo del sensor con el interno del tubo de protección o introduciendo una pequeña cantidad de aceite o de polvo de grafito y aceite en el interior de la vaina, de modo que el termopar quede sumergido.
Los termopares son los instrumentos de medida de la temperatura más comunes en el control de procesos industriales y pueden ser utilizados para su aplicación, por ejemplo, en hornos a altas temperaturas.
Las termorresistencias se basan en la variación de la resistencia eléctrica de un material con la temperatura. Se diferencian dos tipos, los detectores metálicos (generalmente denominados RTD) y los termistores.
Los sensores RTD consisten en un hilo muy fino de un conductor (el más utilizado es el platino), el cual presenta una resistencia que depende linealmente de la temperatura. En el caso de la Pt100, con hilo de platino, su valor es de 100 W a 0° C. Esta resistencia se mide con un puente de Wheatstone (formando parte o no de un sensor piezorresistivo) en conjuntos denominados de dos o tres hilos. Los circuitos de dos hilos unen directamente los dos bornes de la sonda a uno de los dos brazos del puente, por lo que la longitud del cable de conexión entre la sonda y el receptor influye en la precisión de la lectura. En el montaje de tres hilos esta influencia es compensada, ya que dos de los tres hilos que unen la sonda de resistencia al puente se encuentran en brazos opuestos del puente.
Al igual que los termopares, generan señales eléctricas que pueden ser amplificadas y transmitidas a grandes distancias. Por lo general, los RTD son más precisos y estables que los termopares, sin embargo su uso está limitado a un rango de temperaturas más estrecho (el RTD de platino cubre el rango desde -260 a 630°C).
En un termistor la medida se hace basándose en el cambio de la resistencia de un semiconductor de cerámica. En este caso, la relación entre la resistencia y la temperatura es negativa y no lineal. No obstante, este tipo de detector tiene un rango limitado de temperatura, de aproximadamente -195 a 450°C, lo cual reduce su aplicabilidad.
Los termistores tienen una elevada resistencia a bajas temperaturas, pero ésta disminuye exponencialmente al aumentar la temperatura. Dada su estabilidad, pequeño tamaño y su rápida respuesta, son utilizados para medidas a baja temperatura y en márgenes estrechos de temperatura (entre -40 y 150°C). Por ello se emplean principalmente en aplicaciones médicas y de laboratorio.
Un sensor de infrarrojos es el tipo de detector que utiliza un pirómetro de radiación (7); los pirómetros de radiación están constituidos por cuatro partes: un sistema óptico, un detector de radiación, un sistema eléctrico y un dispositivo de lectura.
Todos los materiales emiten radiación electromagnética, dependiendo de su temperatura; en muchas situaciones de proceso, esta energía está en la región infrarroja. Con el aumento de la temperatura, la cantidad de radiación infrarroja y su frecuencia aumentan. Los sensores de infrarrojos miden la radiación de energía térmica emitida por una superficie.
Estos detectores tienen la ventaja de realizar la medida a distancia, sin entrar en contacto con el cuerpo cuya temperatura se está midiendo. No obstante, esta característica se convierte en un problema por la falta de repetibilidad en las lecturas debido a alteraciones en la energía radiada por el cuerpo, o a las absorciones o emisiones parásitas de los gases o humos situados entre el cuerpo y el detector. Otro inconveniente es su elevado precio, por todo ello se evita utilizarlos siempre que pueda emplearse un sensor de contacto convencional. Así pues, generalmente su uso se reduce a medidas por encima de los 3000°C, que exceden el rango de aplicación de otro tipo de detectores.
Un sistema térmico de relleno (FTS) puede medir los cambios de volumen o de presión que acompañan a una variación de la temperatura. El sistema básico incluye un sensor de temperatura, un diafragma o bordón, un tubo capilar y un fluido. El sensor se coloca donde se ha de medir la temperatura, y el tubo conecta este sensor con el elemento de movimiento (diafragma, por ejemplo). El movimiento del elemento, causado por un cambio en el volumen o la presión del fluido en el sensor, se convierte en un movimiento del cursor en el indicador o registro, o se traduce en una señal eléctrica o neumática utilizada para controlar un proceso.
Se trata de un sistema mecánico y por ello tiene una serie de ventajas, como son: no requerir potencia eléctrica; no hay riesgo de explosión; un mantenimiento sencillo; y, al no tener componentes eléctricos, la fiabilidad y estabilidad son más elevadas (aunque serán posibles ciertos fallos mecánicos). No obstante, su uso está limitado por la temperatura máxima que puede medir (760°C), por no poderse acoplar varios sensores a una misma unidad o por el tamaño del equipo, entre otros motivos.
Hay dos modos de conducir la información de la temperatura al punto de uso. El primero es conectando directamente el sensor a la tarjeta de entrada de temperatura del sistema, lo cual reduce el número de terminaciones eléctricas, o mediante un cableado. El otro modo consiste en conectar el sensor a un transmisor, que amplifica la señal eléctrica hasta el punto de uso mediante una conexión con hilo de cobre.
Realizar una conexión directa o por cable conlleva una serie de errores en la precisión, estabilidad de la señal y el coste. Por otra parte, al utilizar un cableado, éste actúa como una antena y amplifica también las interferencias electromagnéticas y radio-frecuencias.
Un transmisor es capaz de enviar la señal amplificada del sensor, a mucha distancia, sin degradarla. Los transmisores pueden clasificarse como detectores de dos o cuatro conexiones, dependiendo de las conexiones necesarias para la entrada y salida de la señal. También, puede hablarse de transmisores aislados y no aislados (9). Se usará un transmisor cuando la señal se tenga que enviar a más de 30 m de distancia o para distancias menores, si se trabaja en ambientes con muchas interferencias eléctricas o si se necesita una precisión elevada de la medida.
Actualmente, se puede medir la temperatura en un reactor con una precisión de ± 0.1°C, mejorando los sistemas de detección (11), y manteniendo estables los equipos pese a las condiciones adversas en las que se aplican.
Para cada situación concreta, deberán considerarse las características del propio sensor, así como los requisitos de la aplicación, escogiendo el sistema de detección más efectivo en cada caso. Esta elección se basará en el rango de temperatura a medir, la sensibilidad necesaria sobre la medición en ese rango, el grado de precisión necesario, la velocidad de respuesta deseada y el precio de la instalación.
Entre -165°C y 650°C podemos utilizar un termopar o un RTD; éste suele ser el rango normal de la mayoría de procesos químicos industriales. En particular, los termopares pueden utilizarse en un rango más amplio que el de un termorresistencia. Las temperaturas fuera de este rango pueden ser medidas también por estos sensores, pero generalmente con menor precisión.
Los pirómetros de radiación pueden ser utilizados para rangos entre -40°C a 650°C y por encima de 3000°C. Este tipo de detectores son utilizados para medir la temperatura de objetos en movimiento, materiales fundidos, objetos situados en localizaciones inaccesibles y sustancias con las que no es posible el contacto físico (tabla 1).
| Tabla 1. Rango de aplicación de diferentes sensores | ||||||||||||
|
La sensibilidad de un termopar suele definirse como la variación en la salida de voltaje del sensor en función de la temperatura medida; suele considerarse necesaria una sensibilidad mínima de 20 mV/°C. La sensibilidad de un termopar aumenta con la temperatura; por esta razón se elige esta clase de sensor, como el más adecuado para temperaturas por encima de 1250°C.
La sensibilidad de un RTD se define por la variación de la resistencia con la temperatura. Normalmente, un RTD tiene una sensibilidad que permanece constante tanto a temperaturas altas como bajas; alrededor de 0.385 W/°C. Según el rango de temperatura a medir, será más idóneo uno u otro tipo de detector RTD.
Esta es una característica imprescindible en casi todas las aplicaciones. Afortunadamente, la precisión de un termopar o un RTD puede ser cuantificada, mediante unas curvas publicadas por la American Society for Testing and Materials (ASTM); por ejemplo, para un termopar tipo J, en una medida alrededor de 530°F (277°C), puede esperarse una banda de tolerancia de ± 4°F (± 2,24°C).
El sensor de resistencia RTD de platino es el más preciso de todos, comercialmente se dispone de unidades con precisiones de ± 0.1°C a 0°C. Pero hay otros factores a tener en cuenta, como es el uso de un transmisor, que introducen errores adicionales. Estos errores secundarios suelen ser mayores que el error original del propio sensor.
Este tipo de error puede eliminarse mediante una calibración del detector. Aunque, para los termopares aparece un error debido a la unión fría que permanece pese a su calibración.
La constante de tiempo térmico de un sensor es el tiempo para que la señal de salida del sensor alcance el 63,2% de su valor final, cuando hay un cambio brusco en la temperatura.
Los termistores tienen la respuesta más rápida de todos los sensores, con respuestas instantáneas. Sin embargo, tales detectores están limitados a aplicaciones a baja presión y para fluidos no corrosivos y no conductores. La respuesta de un termistor protegido es de 0,2 a 2 s en agua en movimiento, dependiendo de las características del diseño del montaje.
La constante de tiempo de un RTD de platino es generalmente de 5 a 6 s en un baño agitado. Este tiempo de respuesta hay que multiplicarlo por 3-10 cuando dicho sensor está protegido con una vaina o tubo de protección. Para los RTD y termistores, un tamaño más pequeño permite disminuir el tiempo de respuesta; pero a su vez disminuye la constante de disipación, con lo que aumenta la posibilidad de incurrir en errores por el autocalentamiento del detector.
Por lo general, un termopar tiene una excelente velocidad de respuesta. Ésta aumenta con la temperatura y disminuye si el detector está protegido; deberá llegarse a un compromiso entre el hecho de evitar la oxidación y el daño físico del sensor, con el de obtener una rápida velocidad de respuesta.
Las constantes de tiempo y de disipación están influenciadas por el tamaño del sensor, el tipo y velocidad del fluido, el método de montaje y otras consideraciones de uso. En consecuencia, los valores determinados por las pruebas de laboratorio sólo deberían utilizarse como guía, ya que dependiendo de la aplicación particular el resultado será sustancialmente diferente.
El mantenimiento de un termopar, un detector de resistencia (RTD y termistor) y de un sistema térmico de relleno (FTS), se limita al cambio completo del sensor defectuoso. La sustitución de un FTS es la más cara de todas, siendo el termistor el más económico.
El mantenimiento de un sensor de infrarrojos es más complicado y de precio más elevado, ya que el sensor no está separado del circuito de medida (si ocurre un fallo en el sensor, habrá que cambiar todo el equipo de medición).
La calibración de un termopar, FTS, RTD y termistor, requiere el uso de baños de calibración, a temperatura de -40°C a 700°C. También, se usan hornos eléctricos particularmente para las altas temperaturas. Para calibrar un pirómetro de radiación debe disponerse de una cavidad de cuerpo negro.
No sólo es importante escoger el equipo adecuado para cada situación, sino que es necesario conocer la naturaleza de los errores que puedan ocurrir en la medida de la temperatura. Alguno de estos errores están asociados al propio sensor y otros a la instrumentación que toma la lectura del detector.
Casi todos los sensores, con el tiempo, sufren una desviación en la medida que realizan. Es ésta una de las características que muchas veces determina la elección final del equipo, ya que se trata de un factor difícil de determinar y corregir. Dadas las consecuencias de este error en la medida de la temperatura, se considera como un modo de fallo y no como una característica.
Un termopar es sensible de sufrir oxidación y esto alterará la señal de salida, por este motivo tienen más tendencia a desviar la señal de respuesta que un RTD. La velocidad de oxidación depende de la atmósfera a la cual el sensor está expuesto, del tamaño de la conexión del termopar, la temperatura que está siendo determinada, de la composición del termopar y del material de aislamiento.
Existen cálculos sobre las desviaciones de señal que sufren los diferentes detectores, en determinadas condiciones (7). A modo de ejemplo se dan los siguientes valores: para un RTD, < ± 0.1°C/año; para un termistor, < ± 0.11°C/año; para un termopar, < ± 5°C/año; con un FTS no se produce desviación de la señal.
Las interferencias eléctricas están producidas por campos electrostáticos y electromagnéticos, o por el acoplamiento directo con la señal eléctrica de un equipo o una instalación eléctrica.
Los sistemas térmicos de relleno, al ser mecánicos, están exentos de este tipo de efecto. En teoría, los RTD y termistores tampoco deberían verse afectados porque producen señales eléctricas relativamente grandes; sin embargo, en la práctica ocurre este tipo de acoplamientos. Por otra parte, un termopar produce señales de bajo voltaje siendo susceptible a estas interferencias. El origen de estas interferencias puede estar en un motor eléctrico, una línea de alto voltaje o un walkie-talkie, por ejemplo. No obstante, puede eliminarse su efecto mediante una conexión a tierra con una pantalla electrostática.
Cuando se utiliza una vaina o tubo de protección, deberá tenerse en cuenta los efectos que la dinámica del fluido ejerza sobre ésta. Aparte, habrá que asegurarse que el elemento, conexión y los tipos de transmisores casan; también, en la calibración y sustitución.
Aunque un termopar puede fallar cuando hay un circuito abierto, la pérdida gradual de precisión es el problema más usual. Un circuito abierto puede ser detectado fácilmente, añadiendo un montaje apropiado al instrumento de medida que dirija la señal de salida al 0 o al 100% de la escala. Sin embargo, la pérdida de precisión únicamente puede ser detectada al recalibrar el sensor, comparando el resultado in situ con el de otro termopar redundante, o monitorizando la resistencia del circuito. En aplicaciones críticas pueden utilizarse dos termopares conectados en paralelo.
Un detector RTD falla en cortocircuito o con un circuito abierto, dando una lectura del 0% o del 100% de la escala. Además, los elementos RTD son sensibles a las vibraciones. Sin embargo, con estos sensores no hay problemas de pérdida de precisión.
En la tabla 2 se muestran las tasas de fallo de un termopar y un sensor RTD, según datos obtenidos de la literatura.
| Tabla 2. Rango de error y tasa de fallos de diferentes sensores de temperatura. | |||||||||
|
|||||||||
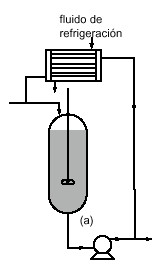
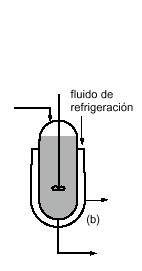
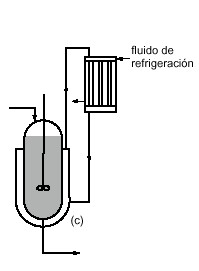
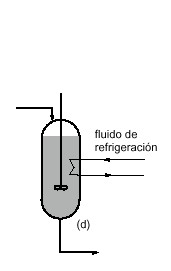
Hay diversos modos de disipar el calor generado en un reactor y mantener la temperatura del proceso dentro de unos límites preestablecidos (figura 1). La elección del sistema de intercambio de calor dependerá del objetivo y características del reactor. Un aspecto importante es que estos sistemas deberían ser diseñados teniendo en cuenta condiciones de operación anómalas; para sistemas en los que es posible una reacción fuera de control, el sistema de eliminación de calor debería ser capaz de funcionar a las temperaturas alcanzadas durante la reacción fuera de control aunque no pueda tener la capacidad de detener la reacción (por ejemplo, si el fluido es agua no debería llegar al límite de vapor). Se ha de garantizar el funcionamiento con el caudal y el tiempo necesario para situar la reacción en un régimen controlado y sin consecuencias (se ha de disponer de suministro energético y de sustancia refrigerante de reserva, para cubrir el 150% de las necesidades, y de elementos de regulación y control redundantes a prueba de fallo y con sistema de alarma).
|
|
|
|
|
|
||
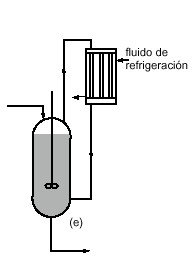
Figura 1. Esquema de alguno de los métodos de refrigeración, comúnmente utilizados en un reactor continuamente agitado:
También es posible una combinación de (b) y (e), es decir disponer de un encamisado simultáneamente con un sistema de reflujo para el disolvente. |
|||
La refrigeración puede realizarse mediante el uso de sistemas de refrigeración diseñados específicamente o por sistemas de reflujo. Para un sistema de refrigeración, las características de transferencia de calor y el flujo de masa del refrigerante pueden ser adaptadas a la capacidad de refrigeración necesaria.
En un reactor continuo, la temperatura se controla por una operación de reflujo con la suficiente capacidad refrigerante.
En un sistema de reflujo, se introduce un disolvente en el sistema de reacción. El punto de ebullición de este disolvente debería ser igual o menor que la temperatura máxima alcanzable en el reactor. De este modo el calor generado por la reacción puede ser eliminado por la entalpía latente de vaporización del disolvente; es decir, el calor requerido para evaporar el disolvente compensa al calor generado durante la reacción, manteniéndose así una temperatura de operación aproximadamente constante. El disolvente condensa a continuación en un intercambiador de calor, en la parte superior del reactor, y regresa como reflujo al reactor. De esta manera se puede evitar una elevación excesiva de la temperatura de la reacción, ya que un aumento en la generación de calor se compensa por un incremento en la velocidad de evaporación del disolvente, siempre que se disponga de la capacidad refrigerante y disolvente necesarios.
Las características básicas y requerimientos para operar de modo seguro son: las propiedades del disolvente o diluyente (temperatura de ebullición, entalpía de vaporización), la cantidad de disolvente (la cual depende de la velocidad de evaporación), la capacidad de condensación del sistema de reflujo (debe ser condensado el suficiente diluyente evaporado) y la velocidad del flujo de retorno del disolvente condensado.
Cuando se lleva a cabo una reacción exotérmica en un reactor discontinuo, la generación de calor varía durante el proceso. En estos casos, la temperatura puede controlarse por refrigeración externa. Sin embargo, debe tenerse cuidado y asegurar que durante la adición, la temperatura del refrigerante no sea demasiado baja, ya que podría causar una disminución de la temperatura de la mezcla de reacción, ocasionando una disminución de la velocidad de la reacción. Esto daría lugar a la acumulación de reactivos, con el consecuente descontrol térmico. Si se elige una temperatura de inicio elevada, la reacción será lo suficientemente rápida para ser controlada todo el tiempo. Desde luego, existe un límite superior para la temperatura de inicio. En consecuencia, debe escogerse una temperatura de inicio suficientemente baja para que no ocurra la descomposición de los reactivos, pero lo bastante alta para que la reacción transcurra rápidamente sin que se acumulen los reactivos.
Los factores que pueden afectar a la velocidad de transferencia de calor en un reactor son la velocidad y el tipo de agitación, el tipo de superficie de transferencia de calor (serpentín o encamisado), la naturaleza del fluido de reacción (Newtoniano o no-Newtoniano), y la geometría del recipiente. En reactores discontinuos o semi-discontinuos agitados, resulta muy útil colocar rompecorrientes o desviaciones para aumentar las turbulencias, las cuales afectan a la velocidad de transferencia de calor así como a la de la reacción.
Como superficie de transferencia de calor puede utilizarse un encamisado, un serpentín o ambos a la vez. Los serpentines son más económicos que los encamisados, dan coeficientes de transferencia de calor más altos, permiten presiones de operación interna más elevadas y son más sencillos de mantener. No obstante, en algunos casos la utilización de un serpentín requerirá un proyecto previo adecuado como, por ejemplo, si se ha de procesar un material altamente viscoso con un gran agitador diseñado para estar cerca de la pared del recipiente.
Se ha mencionado anteriormente que una posible causa de la pérdida de control de una reacción es la presencia de impurezas, en este sentido el uso de un encamisado permite una limpieza del reactor más sencilla. Así, desde el punto de vista de la seguridad, es más apropiado un encamisado. Sin embargo, el área de transferencia de calor de un encamisado está limitada por la geometría del recipiente.
Antiguamente se utilizaba el agua de los ríos para refrigerar un proceso, y se devolvía a estos más caliente. Con el desarrollo industrial, hubo un aumento de la demanda de agua y, en consecuencia, un incremento de la necesidad de crear un sistema que enfriara el agua, con objeto de reutilizarla.
El agua de refrigeración en las industrias de proceso es utilizada según uno de los tres métodos básicos. Uno es el sistema de proceso directo, mencionado anteriormente. El otro incluye una recirculación en un sistema abierto en el cual el agua es enfriada en una torre de refrigeración (dispositivo en forma de torre en el cual el aire atmosférico circula y enfría agua caliente, generalmente por contacto directo) o en un sistema cerrado en el cual el agua es enfriada en un intercambiador de calor utilizando otro fluido (13 y 15). El uso de torres de refrigeración (1, 4 y 16) es el método generalmente empleado, excepto en lugares en los que es posible el proceso directo.
Ya que lo importante es asegurar la eliminación de calor del proceso, habrá que asegurar el suministro de agua fría tomando las medidas pertinentes (asegurar el suministro de energía, no utilizar el agua de refrigeración para otros menesteres, etc.), pero desde luego evitando utilizar agua potable como agua de refrigeración.
Los fluidos de transferencia de calor son utilizados para optimizar el intercambio de calor en numerosas aplicaciones, como por ejemplo cuando se requiere enfriar fluidos de proceso a temperaturas más bajas de las que se alcanzarían usando agua fría, cuando las variaciones de temperatura han de ser controladas de modo preciso o cuando sea preciso evitar el contacto del agua (o vapor) con los productos químicos del proceso. Ejemplos de tales procesos incluyen los reactores para productos químicos orgánicos, farmacéuticos, resinas y plásticos; calderines para la regeneración de aminas y glicol, matrices y moldes para inyección y extrusión de plásticos, y gas de regeneración para sólidos desecantes.
Los intercambiadores de calor están entre los equipos más abundantes en una planta química. El uso del tipo más adecuado y la correcta elección de los fluidos es de vital importancia, con objeto de optimizar el coste, la pérdida de carga y el inventario.
Entre los tipos más comunes están los de placas, y los de haz tubular. Los primeros suelen tener un volumen menor para la misma área de intercambio, permiten el uso de materiales más resistentes a la corrosión y son más fáciles de limpiar. En su contra está la necesidad de encontrar un material adecuado para las juntas y, por otro lado, las bajas presiones a las que se puede trabajar (hasta unos 30 bares).
Generalmente, se diseñan para varias funciones, eligiéndose el diseño final en función de la capacidad para trabajar en las circunstancias más desfavorables. Es necesario realizar una simulación del comportamiento del diseño final en todos los supuestos, así como considerar los efectos del cambio de proceso y/o fluido para evitar situaciones peligrosas.
Es muy importante valorar la fiabilidad (probabilidad de funcionamiento sin fallo durante un tiempo determinado) de algunos componentes de la instrumentación; cuando tienen una baja fiabilidad, obligan a utilizar sensores redundantes en procesos críticos.
El efecto de la refrigeración depende del:
volumen del reactor, masa de reacción y equipos de reacción asociados,
tipo de sistema de refrigeración (por ejemplo, encamisado, serpentín o intercambiador de calor externo),
tipo de refrigerante y circulación, y
cinética/velocidad.
En la práctica, los reactores de gran escala operan cerca de condiciones adiabáticas sobre las que la pérdida de refrigeración causa un aumento máximo en la temperatura. En reactores pequeños el aumento de la temperatura depende del calentamiento del refrigerante y el reactor, y el calor perdido del armazón del reactor y del confinamiento del refrigerante.
Una refrigeración inadecuada puede estar causada por un:
Diseño equivocado
Fallo en la circulación del refrigerante
fallo en la fuente refrigerante
fallo de la energía eléctrica
fallo de la bomba
sistema de refrigeración apagado
pérdida/fuga de refrigerante
bloqueo
congelación
fallo del control automático
fallo del control manual: medición/alarma; error del operador
Agitación inadecuada (empeora la transferencia de calor)
Obstrucción interna por suciedad
Ensuciamiento externo
Fallo en la evaporación del refrigerante
Fallo del condensador
bloqueo de la entrada de vapor al condensador
inundación del condensador
congelación del condensador
Fallo del disolvente moderador
Inadecuada refrigeración del encamisado
Otras causas
Se comentan, a continuación, algunos de los fallos más normales durante la refrigeración de un proceso químico.
Dos ejemplos de las consecuencias críticas de este suceso son: la pérdida de la función de condensación en los sistemas de fraccionamiento superior; y, la pérdida de refrigeración del compresor y de los sistemas de lubricación.
Pueden considerarse diferentes situaciones según si el fallo del enfriador de agua afecta simplemente a un equipo (o unidad de proceso) o a toda la planta. Ejemplos de situaciones en toda la planta incluyen el fallo de la bomba, fallo de una sección del tubo colector principal, o pérdida de ventilación sobre la torre de refrigeración.
Es difícil resumir la carga de estos fallos para evitarlos. La mayoría de las compañías tienen una única aproximación para determinar las velocidades de alivio de torres, compresores, etc. Estas aproximaciones varían según las consideraciones de frío, paro de instrumentos, etc. La API RP 521 discute muchas de estas consideraciones (Guide for pressure-relieving and depressuring systems, 3ª ed., American Petroleum Institute, Washington, D.C., 1990).
La pérdida de agua de refrigeración es un riesgo grave. Suelen instalarse suministradores de corriente alterna o sistemas de bombeo de agua para permitir únicamente una pérdida parcial.
La corrosión de los sistemas de agua de refrigeración suele evitarse por adición de inhibidores de corrosión o captadores de oxígeno o por ajustes de pH. Las condiciones inusuales en el ambiente de la planta o del proceso pueden necesitar también una consideración especial. También, hay que evitar posibles incendios o explosiones en la torre de refrigeración.
Puede pararse la bomba del agua de refrigeración o fallar la energía de la bomba. Las consecuencias son las mismas que en el caso de fallo del control del agua de refrigeración. Las medidas de prevención son las siguientes: disponer de flujo de emergencia de refrigeración por agua (el Método DOW prevé un 50% más de caudal del necesario); despresurizar el reactor; válvulas de seguridad de presión. Otra opción utilizada muy a menudo es la de duplicar la bomba.
Puede fallar el controlador de la temperatura causando un calentamiento excesivo durante la etapa de calentamiento. Se ven afectados la temperatura y la presión del reactor. Las altas temperaturas provocan una reacción fuera de control parecida a cuando falla el sistema de refrigeración. El impacto del suceso y los aspectos de protección son parecidos a los de este tipo de suceso, excepto que el agua refrigerante de emergencia está completamente funcional para detener la reacción fuera de control.
Las medidas preventivas a tomar son las mencionadas anteriormente.
Los problemas más comunes de los intercambiadores incluyen la rotura del tubo, fugas, suciedad, vibración del tubo, polimerización y solidificación (2, 8, 13 y 14). Fallos en los intercambiadores de calor provocan cambios de presión (sobrepresión o baja presión) y una contaminación del fluido de transferencia de calor o del fluido de proceso. Existirá un mayor riesgo cuando ambos fluidos puedan reaccionar violentamente al entrar en contacto. Así pues, deberían adoptarse medidas para monitorizar estas situaciones y evitar la utilización de fluidos reactivos.
Uno de los puntos más débiles de los IC de haz tubular son las juntas de expansión. Cuando existe una diferencia de temperatura importante entre la carcasa y los tubos, la dilatación crea tensiones que, de no introducir elementos de flexión en la carcasa, podrían dañar muy severamente el intercambiador, produciendo deformaciones en los tubos, fugas en las uniones de los tubos con la placa tubular o incluso roturas. Desde la etapa de diseño puede evitarse el uso de juntas de expansión en numerosos casos.
En la tabla 3 se muestran las tasas de fallo de algunos intercambiadores de calor, encontradas en la literatura (8).
| Tabla 3. Tasas de fallo (fallos/106 horas) de intercambiadores de calor (fuente: OREDA92, Offshore Reliability Data, 2 nd ed., Hovik, Norway). | ||||||||||||||||||||
|
En un intercambiador de calor puede ocurrir que se ensucie la superficie de intercambio, lo cual afecta a la transferencia de calor y provoca, además, que la presión disminuya. La reducción en la capacidad de transferir calor puede ser particularmente grave si el intercambiador se utiliza para refrigerar un reactor en el que se lleva a cabo una reacción exotérmica. Por otro lado, el aumento en la caída de la presión implica, por ejemplo, la reducción del flujo máximo que pasa por el intercambiador.
Un exceso de suciedad puede llegar a ocasionar el bloqueo del intercambiador.
Se consigue un ensuciamiento menor con la selección correcta del tipo de fluido de transferencia y del caudal aplicado.
El uso de intercambiadores de calor compactos, con largos tubos y con velocidades altas de fluido, ha intensificado el problema de la vibración de los tubos.
La vibración de los tubos puede causar daños a los propios tubos, a la carcasa del intercambiador y, probablemente, a los soportes o tuberías conectadas a éste. Además, pueden transmitir fluctuaciones de presión desde el intercambiador y generar un ruido excesivo.
Una de las causas más frecuentes de la rotura de los tubos de un IC es la vibración. Los estándares de TEMA (Tubular Exchangers Manufacturers Association, TEMA: Standards, 7ª ed. Tarrytown, 1988) proporcionan las normas a seguir para la detección de los posibles problemas de vibración en la etapa de diseño.
Otra causa de rotura del tubo es el exceso de presión. El código ASME declara que “los intercambiadores de calor y otros recipientes estarán protegidos con un sistema de alivio de capacidad suficiente para evitar la sobrepresión en el caso de un fallo interno”. La caracterización de los tipos de fallo, determinación de la capacidad de alivio necesaria, y la selección y localización de los mecanismos de alivio corresponden a la realización del diseño. API RP 520 presenta un guía para la determinación de estos requerimientos, incluyendo un criterio para decidir cuando la rotura total de un tubo es una emergencia probable.
La capacidad requerida para la válvula de alivio de presión debe prever un caudal de paso, desde el lado de alta presión al de presión menor, igual al que pasaría por un tubo con sección el doble que la interior de un tubo.
El primer paso en cualquier decisión para lograr que un proceso sea seguro y fiable es obtener datos genéricos que puedan ser utilizados como criterio para determinar la fiabilidad de un equipo.
La base de datos RELDAT™ (12) ha sido desarrollada para que la información de datos genéricos, para el análisis de fiabilidad y seguridad, esté fácilmente accesible. El programa pretende ser la primera base de datos de fiabilidad para los analistas que no tienen acceso a otros datos o para complementar otras fuentes disponibles. Los datos suministrados en RELDAT™ son resultado del cruce de una gran variedad de sectores de la industria y ha sido recogida durante un periodo de 20 años.
Sin embargo, esta base de datos tiene alguna limitación como el hecho de que la búsqueda sólo puede hacerse sobre una serie limitada de tipos de componentes. En la tabla 4, están detallados los datos registrados en la base RELDAT™ sobre componentes relacionados con la variable temperatura, su modo de fallo, y la tasa de fallo.
| Tabla 4. Tasas de fallo de diferentes componentes, según el modo de operación y función. Información obtenida de la base de datos RELDAT™. | |||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||
| *Un dispositivo bimetálico da una lectura de temperatura basándose en la diferente expansión térmica de dos metales distintos. Se trata de un sistema portátil y que no necesita suministro eléctrico, aunque menos preciso que un termopar o un detector de resistencia. |
(1) BOFFARDI, B.P. and SMITH, A.L.
Chemical treatment makes cooling water reusable.
Chem. Eng., 1995, vol. 102, nº 7, p. 106-108.
(2) CCPs.
Guidelines for engineering design for process safety.
New York, Center for Chemical Process Safety of the American Institute of Chemical
Engineers, 1993, 556 p.
(3). CCPs.
Guidelines for safe automation of chemical process.
New York, Center for Chemical Process Safety of the American Institute of Chemical
Engineers, 1993, 424 p.
(4) CHIN, K.
Minimizing risks with recycled water.
Chem. Eng., 1996, vol. 103, nº 12, p. 33-37.
(5). CREUS SOLÉ, A.
Control de procesos industriales: criterios de implantación.
Barcelona, Marcombo, S.A. Boixareu edts., 1988, 139 p.
(6) DOW
Fire and Explosion Index. Hazard Classification Guide.
7th ed. Midland: Corporate Safety. Loss Prevention and Security
Publications. Dow Center, 1994.
(7) KENNEDY, R.H.
Selecting temperature sensors.
Chem. Eng., 1983, vol. 90, nº 16, p. 54-71.
(8) LEES, F.P.
Loss prevention in the process industries. Hazard identification, assessment and
control.
2nd ed. Oxford, ButterwothHeinemann, 1996, vol. 1.
(9) LEWIS, C.W.
Measure remote temperatures efficiently.
Chem. Eng., 1990, vol. 97, nº 5, p. 114-125.
(10) LEWIS, C.W.
Accuracy in temperature measurements.
Chem. Eng., 1993, vol. 100, nº 12, p. 84-87.
(11) LEWIS, C.W.
Make the most of moreprecise temperature measurements.
Chem. Eng., 1998, vol. 105, nº 5, p. 90-94.
(12) RELDAT™,
Generic Reliability Database.
AEA Technology, 1994.
(13) SANTAMARÍA, J.M. y BRAÑA, P.A.
Análisis y reducción de riesgos en la industria química.
Madrid, Fundación Mapfre, ed. Mapfre, 1994. 522p.
(14) SLOAN, M.
Designing and troubleshooting plate heat exchangers.
Chem. Eng., 1998, vol. 105, nº 5, p. 78-88.
(15) TROM. L.
Heat exchangers: is it time for a change?
Chem. Eng., 1996, vol. 103, nº 2, p. 70-73.
(16) WILLA, J.L.,
Improving cooling towers.
Chem. Eng., 1997, vol. 104, nº 11, p. 92-96.
La autora desea expresar su agradecimiento al Centre de Desenvolupament de Processos de Química Fina, del Laboratori General d’Assaigs i Investigacions, y particularmente a Mª Teresa Sanfeliu por la ayuda y consejos dados.